AMS'nin Temel İşlevleri ve İş Akışı Tanıtımı
- AMS besleme sistemi tanıtımı
- Birinci aşama besleyici
- Filament göbeği
- Tampon (AMS Merkezi)
- Ekstrüder
- AMS'nin temel işlevleri
- Ön yükleme
- RFID okuma
- Kalan Filament Tahmini
- Otomatik eşleme fonksiyonu
- Filament bitme algılama ve otomatik doldurma fonksiyonu
- AMS İş Akışı
- Yükleme ve Boşaltma
- Besleme Yardımı Modu
AMS besleme sistemi tanıtımı
AMS besleme sistemi iki ana bölüme ayrılabilir:
1. Birinci aşama besleyici + Filament göbeği + Tampon
2. Ekstrüder (Kesici sensör + Filament algılama sensörü)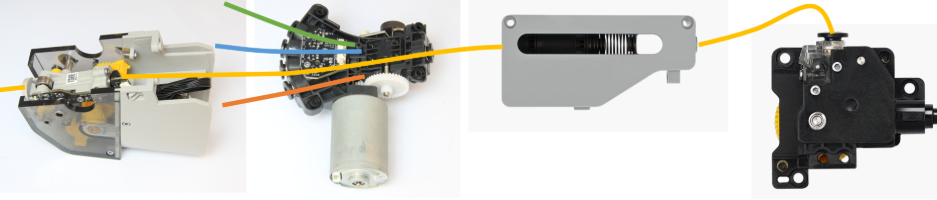
AMS besleme yolu diyagramı
Besleme ünitesi ve filament merkezi, filamenti algılayarak yükleme ve boşaltma işlemlerini gerçekleştirir. Tampon, sinyali AMS'ye ve yazıcıya geri göndererek besleme hızını kontrol eder. Ekstrüderin içinde bir kesici sensörü ve filament algılama sensörü bulunur ve sensör sinyalleri de filamentin normal şekilde beslenip beslenemeyeceğini değerlendirmek için AMS'ye geri gönderilir. Kısacası, AMS ve yazıcı, sorunsuz bir besleme süreci sağlamak için her sensörden gelen sinyal geri bildirimine güvenir.
Birinci aşama besleyici
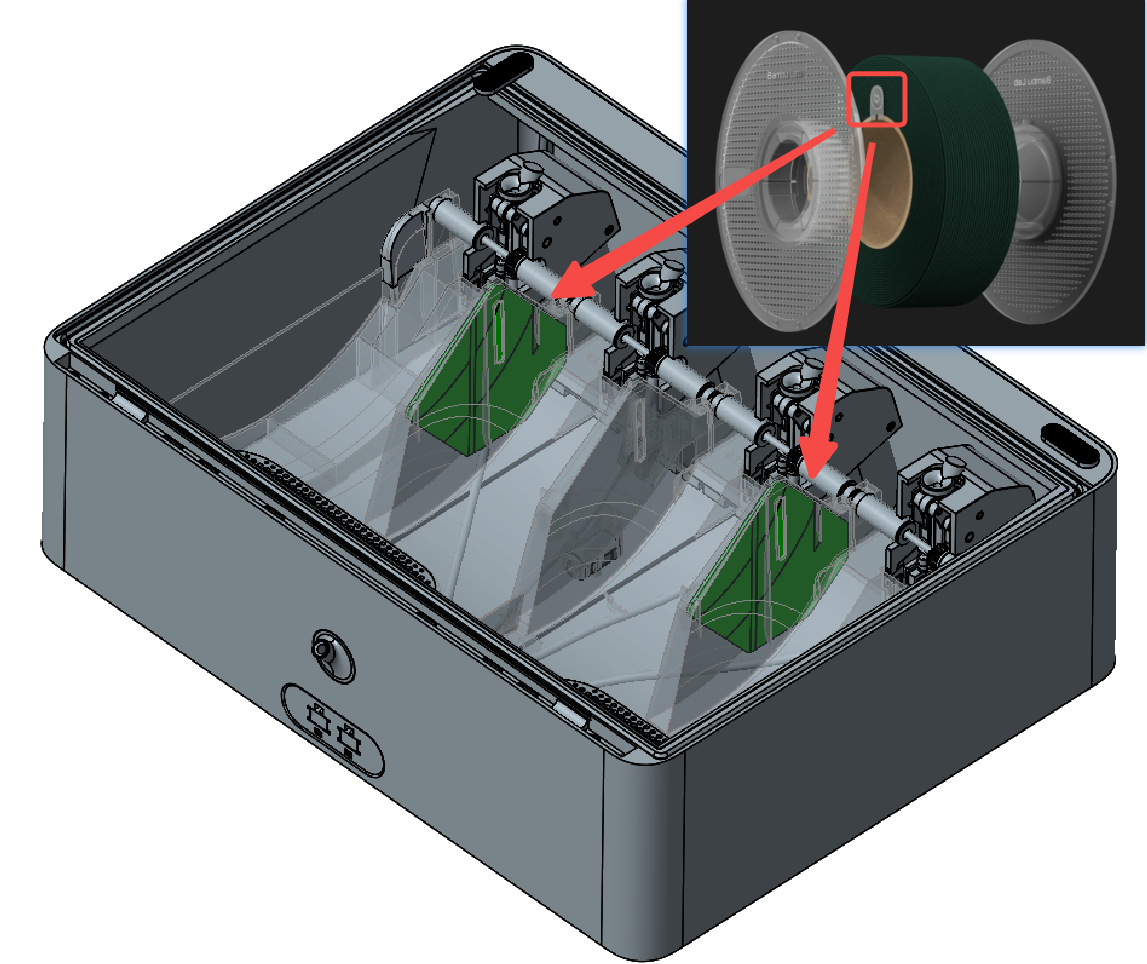
AMS üzerinde, filamenti AMS'ye çeken dört besleyici bulunur. Ayrıca, filament boşaltılırken makarayı döndürmek için siyah kılıf ünitesini de çalıştırır.
Besleme ünitesinde bir filament algılama sensörü bulunmaktadır. Filamentin yerleştirildiğini algıladığında, motoru çalışmaya başlayacak ve ön yükleme için filamenti otomatik olarak içeri çekecektir. Algılama sensörünün konumu aşağıda gösterilmiştir: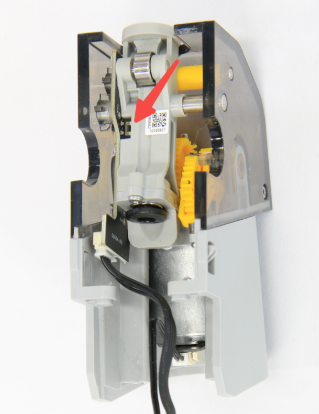
Filament göbeği
Filament besleme merkezi, AMS'nin arka tarafında bulunur ve dört sensör, bir kilometre sayacı ve bir motordan oluşur. Dört besleme yolunu tek bir yolda birleştirir. Sensör, filamentin besleyiciden filament besleme merkezine beslendiğini algıladıktan sonra, filamentin ekstrüdere gönderilmesi için ikinci bir itici güç sağlamak üzere motor devreye girer.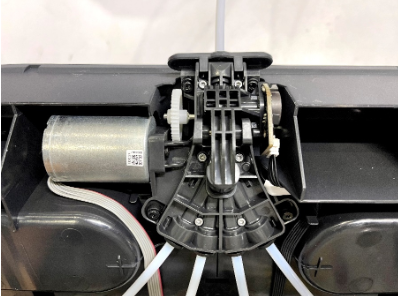
Aşağıdaki şekilde filament hub'ının filament algılama sensörü ve kilometre sayacının konumu gösterilmektedir. Filament, filament hub'ına girip çıktığında, sensörün sinyali değişir, böylece AMS, filamentin filament hub'ına gönderilip gönderilmediğini değerlendirebilir. Filament hub'ının iç yapısı için wiki'ye bakabilirsiniz: AMS filament hub'ının sökülmesi ve temizlenmesi | Bambu Lab Wiki
Kilometre sayacı, filamanın AMS'den dışarı gönderilip gönderilmediğini belirlemek için kullanılır ve ayrıca gönderilen filamanın uzunluğunu hesaplamak için de kullanılabilir.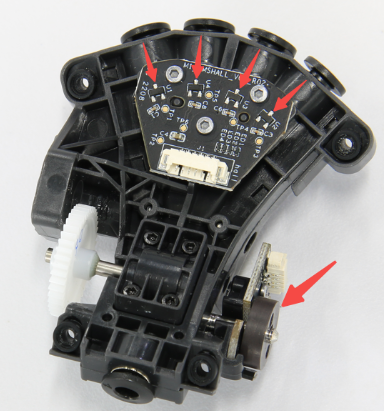
Filament sensörleri ve kilometre sayacı
Tampon (AMS Merkezi)
AMS ile yazıcı arasında (birden fazla AMS bağlandığında AMS hub'ı kullanılır) kullanılan tampon, bir kaydırıcı, yay ve sensörden oluşur. AMS, filamenti takım başlığı ekstrüderine ittiğinde, filament beslemesinin basıncı kaydırıcıyı sağa doğru iter ve tamponda küçük bir filament bölümü depolar. Ekstrüder tampondaki filamenti tükettiğinde, kaydırıcı sola döner. Kaydırıcının konumu sensörler tarafından algılanır ve besleme hızını ayarlamak için AMS'ye ve yazıcıya geri iletilir.
Ekstrüder
Ekstrüder, baskı için filamenti dışarı püskürtmek için kullanılır. Aşağıdaki şekilde gösterildiği gibi, içinde bir filament algılama sensörü ve bir kesici algılama sensörü bulunur: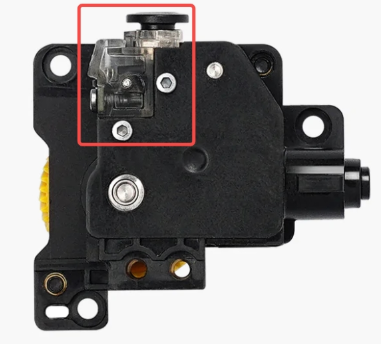
Filament algılama sensörü
Aşağıda gösterildiği gibi, filament algılama anahtarı bir mıknatıs ve bir Hall sensöründen oluşmaktadır. Filament takıldığında, mıknatıs Hall sensörüne yaklaşır; filament olmadığında ise mıknatıs otomatik olarak eski haline döner. Yazıcı, algılanan Hall değerine göre ekstrüderin içinde filament olup olmadığını belirler.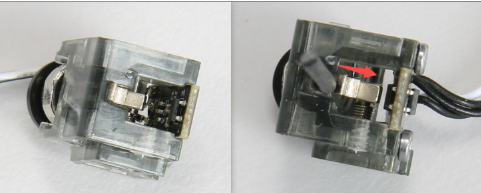
Filament takıldığında mıknatısı sensöre doğru iter.
Filament algılandığında ekranda yeşil bir nokta görünecektir: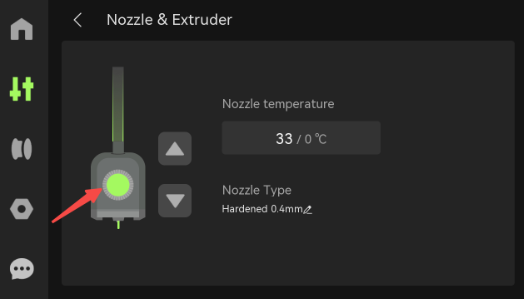
Kesici sensör
Aşağıdaki şekilde kesicinin Hall sensörü gösterilmektedir. Kesicinin sapında bir mıknatıs bulunur. Kesici filamenti kestiğinde, mıknatıs Hall sensörüne yaklaşır; kesme işlemi bittiğinde, kesici geri yaylanır ve Hall değeri işlem boyunca değişir. Yazıcı, algılanan Hall değerine dayanarak kesicinin sıkışıp sıkışmadığını ve kesme işleminin başarılı olup olmadığını belirleyebilir.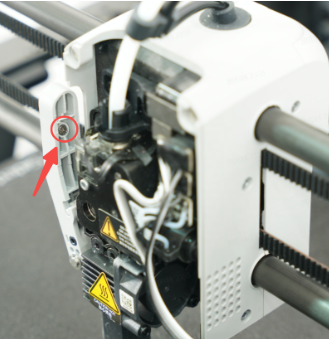

AMS'nin temel işlevleri
Ön yükleme
AMS boşta iken, filament besleyiciye yerleştirildiğinde, besleyici filamenti filament merkezine gönderir ve filament merkezi sensörü algılayana kadar biraz geri çeker. Bu işleme ön yükleme denir. Ön yükleme, kullanıcıya filament yerleştirirken etkileşimli geri bildirim sağlamanın yanı sıra, makaradaki filamentin gevşek olmamasını sağlamak için filament rulosunu da sıkılaştırabilir.
Takma yardımı fonksiyonu: Ön yüklemeden önce, ekrandaki boş yuva simgesine dokunabilirsiniz; bu sayede besleme ünitesinin motoru ve dişlileri dönmeye başlayacak ve filamentlerin takılması kolaylaşacaktır.
RFID okuma
Bambu'nun resmi filament rulosunun her iki tarafında da RFID etiketleri bulunur ve AMS'de filament bilgilerini okuyabilen iki adet RFID okuma devre kartı vardır.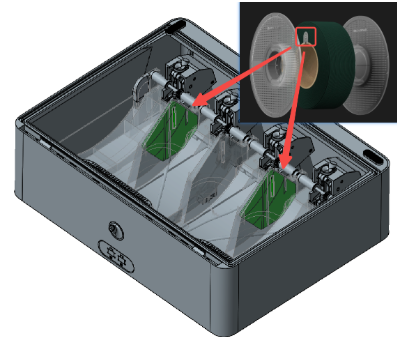
RFID okuma işlevi, takma/başlatma sırasında güncellemeler için ekranda ayarlanabilir. "Takma Sırasında Filament Oku" etkinleştirilirse, AMS ön yüklemeden sonra filament RFID'sini okumaya başlar. Benzer şekilde, "Başlatma Sırasında Filament Oku" etkinleştirilirse, yazıcının her yeniden başlatılmasından sonra, sırayla her bir yuvadaki filamentin RFID'sini okumaya başlayacaktır.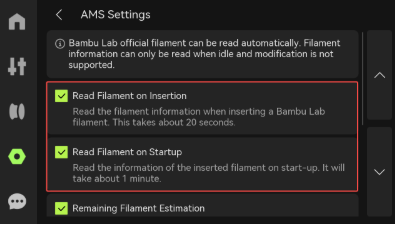
RFID okuma işlemi için ekran/dilimleyici üzerindeki her yuvanın üstündeki simgeye manuel olarak da tıklayabilirsiniz.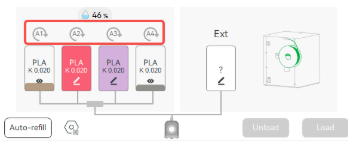
RFID'yi okumak için tıklayın
RFID'yi yeniden okumak için makarayı seçin ve Yeniden Oku'ya tıklayın.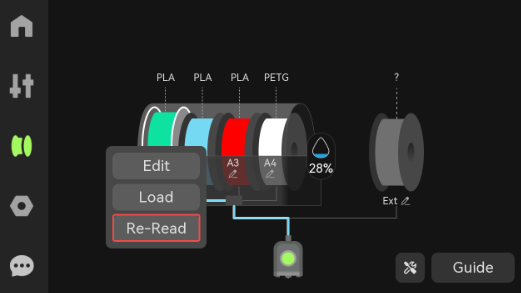
AMS, RFID'yi okuduğunda, önce makarayı sıkıştırmak için ön yükleme yapar. Ardından, makarayı döndürmek için filamenti AMS'nin bir bölümünden dışarı gönderir; bu da devre kartının RFID etiketini taramasına ve RFID bilgilerini okumasına olanak tanır.
Bir yuvadaki filament AMS'ye gönderildiğinde veya ekstrüder içeride filament olduğunu algıladığında, RFID okuma işlevi kullanılamaz. "Okumak için tıklayın" seçeneği, AMS'nin meşgul olduğunu ve filament bilgilerini okuyamadığını gösterecektir.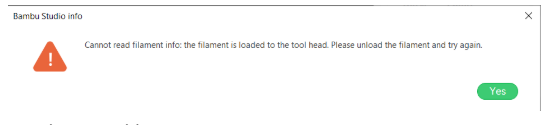
Kalan Filament Tahmini
RFID okuma işlemi, kalan filament miktarını tahmin etmek için de kullanılabilir. Çalışma prensibi, makaradaki RFID etiketinin tam bir tur dönmesinden sonra dışarı gönderilen filamentin uzunluğuna göre makarada kalan filamentin yüzdesini tahmin etmektir. 1 kg'lık filament rulosunun tamamı varsayılan olarak %100 kapasitededir.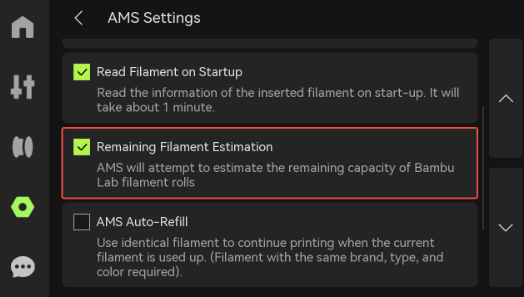
Filament tipinin altındaki küçük yatay çubuk, tahmini kalan filament sayısını göstermektedir.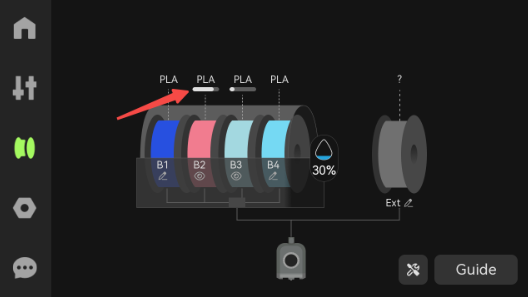
P1 serisi için, 'Kalan kapasiteyi güncelle' özelliğini etkinleştirdikten sonra, lütfen Bambu Studio veya Bambu Handy'de kontrol edin.
Otomatik eşleme fonksiyonu
Dilimleme yazılımında çok renkli bir baskı görevi gönderdiğinizde, model otomatik olarak AMS yuvalarındaki en yakın renkli filamentle eşleştirilir. Ayrıca pencereden filamentleri özelleştirebilirsiniz.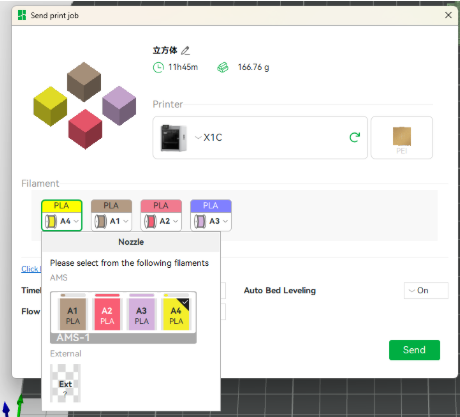
Filament bitme algılama ve otomatik doldurma fonksiyonu
AMS baskı kullanırken, filament bitme algılama fonksiyonu hala mevcuttur ve bu fonksiyon aşağıdaki iki duruma ayrılabilir:
1. Tek filamentli baskı: AMS olmadan baskı yaparken kullanılan filament bitme algılama mantığıyla aynıdır. Baskı kafası filamentin bittiğini algıladığında, filamentin bittiğini ve yeni bir filament takılması gerektiğini bildirir.
2. Çoklu filament baskısı: Çoklu filament baskısının özel bir durumu vardır; filamentin son bölümü makaradan ayrılmıştır. Bu durumda , baskı sırasında filament değiştirilmesi gerekiyorsa, filament artık geri çekilemeyeceği için kalan filament doğrudan temizlenir ve temizleme işlemi tamamlandıktan sonra baskıya devam etmek için başka bir filament yuvasına geçilir. Ekranda filamentin bittiği belirtilir, lütfen eski filament temizlenene kadar bekleyin.
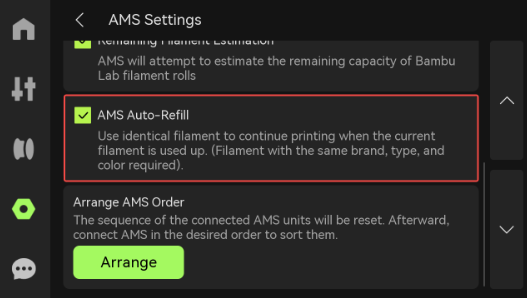
3. AMS Otomatik Doldurma: Mevcut filament bittiğinde AMS , aynı filament özelliklerine sahip başka bir makaraya otomatik olarak geçecektir . Bu özelliği etkinleştirmek için lütfen AMS ayarları sayfasında " AMS Otomatik Doldurma " seçeneğini işaretleyin.
- Bu işlev, tamamen aynı özelliklere sahip filamentler gerektirir. Bu filament özellikleri arasında marka, tip, renk ve nozul sıcaklığı bulunur.
- AMS aynı filamenti bulamazsa, mevcut yuvanın boşaldığını belirten bir uyarı mesajı görüntüler.
- Bambu filamentin bambu filament yerine, bambu olmayan filamentin ise bambu olmayan filament yerine kullanılması tavsiye edilir.
Not: Lütfen baskı işlemi sırasında duraklatma ve filament boşaltma işlemlerinden kaçının , çünkü filament boşaltma işlemi filament yedekleme işlevini bozabilir ve harici makaradan beslemeye geçilmesine neden olabilir.
AMS İş Akışı
Yükleme ve Boşaltma
Yükleme işlemi sırasında , besleyici filamenti filament göbeğine gönderir. Filament göbeğinin kilometre sayacı, AMS'den gönderilen filamentin kısa bir uzunlukta olduğunu hesapladığında, besleyici çalışmayı durdurur ve ardından filament, filament göbeği motoru tarafından takım kafasına beslenir.
Boşaltma işlemi sırasında besleyici ve filament motoru eş zamanlı olarak çalışır. Besleyici, makaranın dönmesini sağlarken, filament göbeği motoru da filamenti geri çeker.
Besleme ünitesinin sol ve sağ salıncak dişlileri sırasıyla besleme ve boşaltma işlemlerini kontrol eder. Sağ salıncak kolu, filamenti beslemek için dişliyi yukarı kaldırırken, sol salıncak kolu ise filamenti boşaltmak için siyah silindiri döndüren dişliyi yukarı kaldırır, aşağıdaki şekilde gösterildiği gibi.
Besleme Yardımı Modu
AMS, filamenti ekstrüdere gönderip başarılı bir şekilde ekstrüzyon yaptığında, besleme destek moduna geçer. AMS, tamponun geri bildirim değerine göre besleme veya geri çekme işlemine yardımcı olur. Filament göbeği motoru, kaydırıcının konumuna bağlı olarak ileri beslemeye devam edip etmeyeceğine karar verir: Besleme işlemi dirençle karşılaştığında, tampondaki kaydırıcı sağa doğru itilir. Filament ekstrüder tarafından tüketildiğinde, kaydırıcı sola döner. Filament bitmek üzereyken, son filament parçası filament göbeğinden dışarı gönderildiğinde, ekstrüder filamentin tamamen tükendiğini algılayıp baskıyı durdurana kadar filament göbeği motoru çalışmaya devam eder ve ardından motor dönmeyi durdurur.
Tüm süreç şu şekildedir:
AMS, filament ekstrüdere gönderildikten sonra besleme destek moduna geçer ve filament AMS'ye geri çekildikten veya makine yeniden başlatıldıktan sonra bekleme moduna geri döner. Besleme destek modunda, AMS, baskı yapılıp yapılmadığına bakılmaksızın, yalnızca tamponun sinyal geri bildirimine göre beslemeye devam edip etmeyeceğine karar verir.